Kelly Zhu
About Me
I’m a MSc student in the Department of Computer Science at the University of Toronto. I am supervised by David Lindell at the Toronto Computational Imaging Group. I am broadly interested in computer vision, machine learning, and robotics.
I completed my undergraduate degree in Engineering Science at the University of Toronto. I was supervised by Florian Shkurti for my undergraduate thesis on multi-agent trajectory prediction. I also interned at Huawei Noah’s Ark Lab, where I worked on simulation and 3D reconstruction for autonomous driving.
News
- [Aug 2024] I was awarded the Queen Elizabeth II Graduate Scholarship in Science & Technology!
- [May 2024] I was selected as a recipient of the Vector Scholarship in AI.
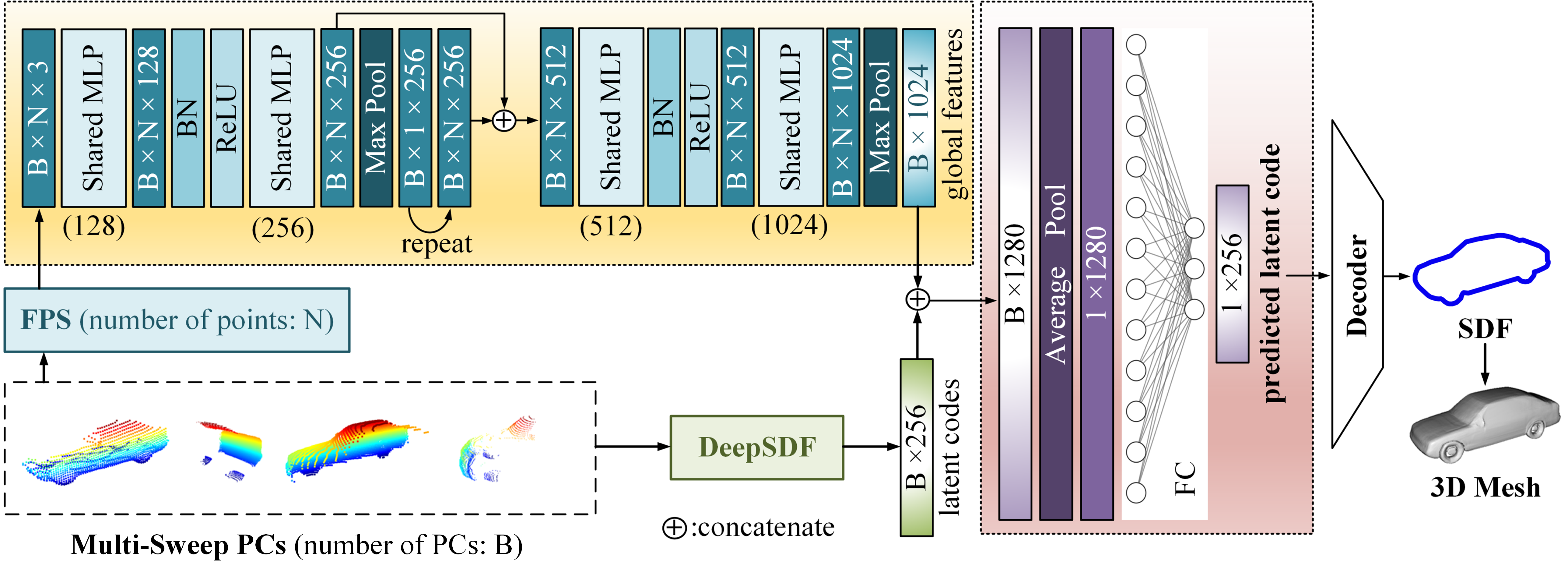
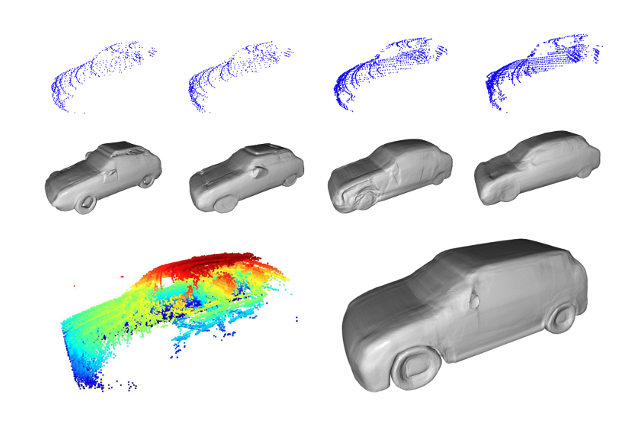
- [Jul 2023] Our paper on multi-view 3D vehicle reconstruction has been accepted to ICCV 2023!
Publications
-
 ICCV
International Conference on Computer Vision (ICCV), 2023.
ICCV
International Conference on Computer Vision (ICCV), 2023.

Research Experience
-
 Undergraduate Thesis Student (Supervised by Prof. Florian Shkurti)RVL LabSep 2023 - Sep 2024 | University of Toronto
Undergraduate Thesis Student (Supervised by Prof. Florian Shkurti)RVL LabSep 2023 - Sep 2024 | University of Toronto
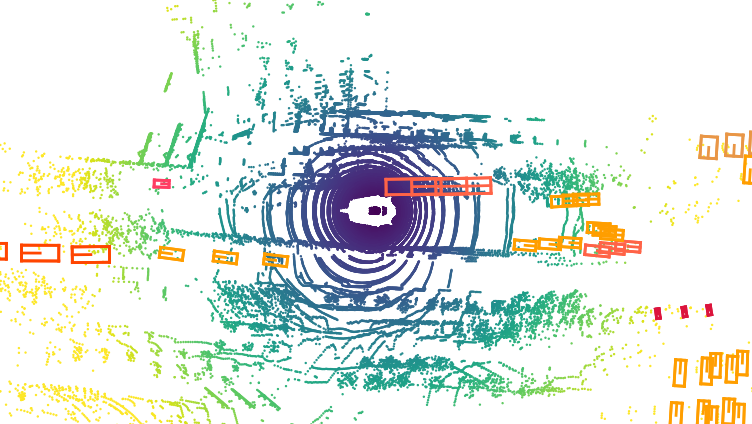
Contributed to a multi-agent 3D detection and trajectory prediction model from multi-sweep LiDAR data to achieve real-time, collision-free motion planning
-
 DAAD RISE Intern (Supervised by Prof. Alexander Braun)safe.trAIn by Siemens AGMay 2023 - Aug 2023 | Hochschule Düsseldorf
DAAD RISE Intern (Supervised by Prof. Alexander Braun)safe.trAIn by Siemens AGMay 2023 - Aug 2023 | Hochschule Düsseldorf
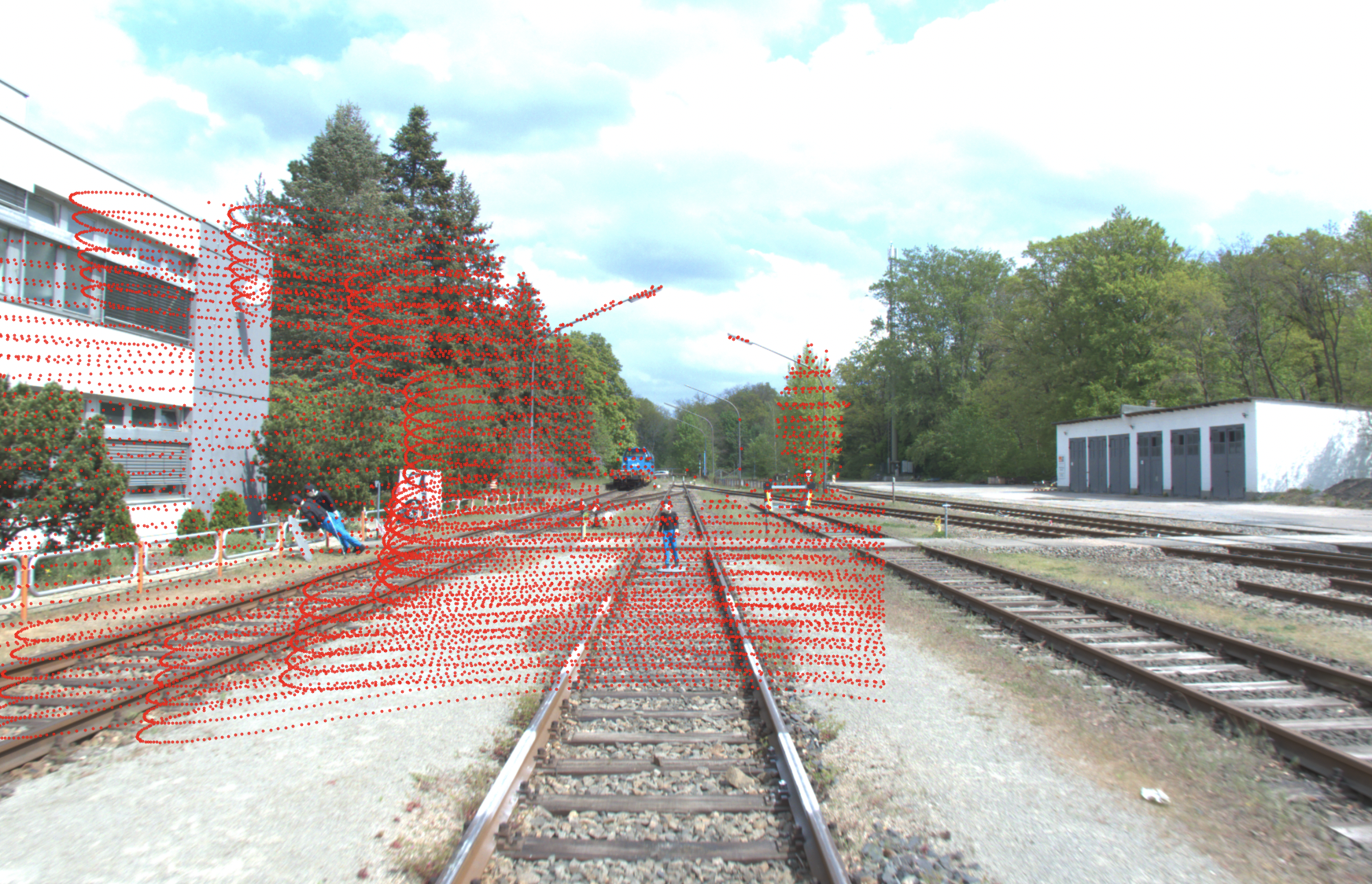
Built a 3D point cloud landmark extraction pipeline using LiDAR and camera data for refinement of camera calibration techniques in autonomous train technology
-
 Perception ResearcherHuawei Noah's Ark LabMay 2022 - Apr 2023 | Toronto, ON
Perception ResearcherHuawei Noah's Ark LabMay 2022 - Apr 2023 | Toronto, ON
Developed perception and simulation systems for autonomous vehicles. Topics of research included 3D reconstruction, LiDAR sensor simulation, object detection, and multimodal scene understanding.
-
 Undergraduate Researcher (Supervised by Prof. Jonathan Kelly)STARS LabMay 2021 - Sep 2021 | University of Toronto
Undergraduate Researcher (Supervised by Prof. Jonathan Kelly)STARS LabMay 2021 - Sep 2021 | University of Toronto
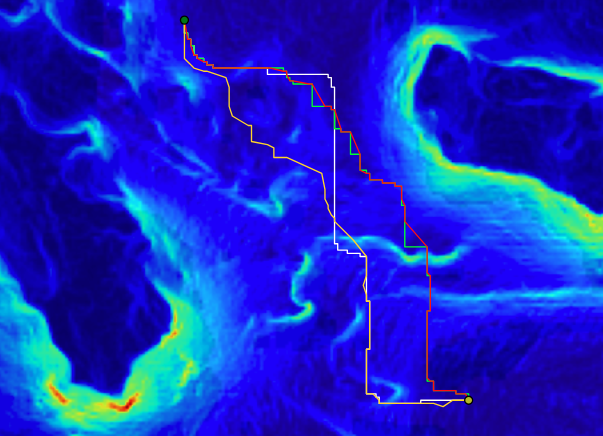
Investigated efficient path planning on weighted graph maps for planetary navigation, using NASA’s Mars 2020 Rover Mission as a performance benchmark
-
 Undergraduate Researcher (Supervised by Prof. Andrew Goldenberg)Robotics and Automation Lab (RAL)May 2020 - Aug 2020 | University of Toronto
Undergraduate Researcher (Supervised by Prof. Andrew Goldenberg)Robotics and Automation Lab (RAL)May 2020 - Aug 2020 | University of Toronto
Designed and prototyped an autonomous bed-making robot on a 6-DoF robot arm mounted on a mobile platform. Responsible for depth camera calibration and LiDAR-based platform navigation.
Industry Experience
-
 Autonomy Engineering InternTrimble ApplanixMay 2021 - Sep 2021 | Toronto, ON
Autonomy Engineering InternTrimble ApplanixMay 2021 - Sep 2021 | Toronto, ON
Aided with the development of LiDAR-based SLAM and perception solutions for integration with Applanix's inertial navigation system in autonomous driving applications